Có rất nhiều cách điều khiển hộp động cơ servo cùng tính năng chủ yếu của chúng là tài năng điều khiển một cách đúng mực vị trí của trục. Động cơ servo được xem là một hệ thống vòng kín, trong số đó sử dụng biện pháp phản hồi vị trí để có thể điều khiển hoạt động của trang thiết bị và thế được vị trí cuối cùng của nó.
Bạn đang xem: Điều khiển vị trí dc servo
1. định nghĩa motor servo là gì?
Trong công nghiệp, bộ động cơ servo motor chính là loại cảm biến phản hồi đúng đắn về vị trí. Vì chưng đó, khi điều khiển và tinh chỉnh động cơ servo thường là 1 bộ code được mã hóa có độ đúng mực cao. Trong khi đó, ở các động cơ RC hoặc motor nhỏ hơn, cảm ứng vị trí thường dùng là một chiết áp rất đối kháng giản.
Vị trí thực tiễn đã được tra cứu thấy bởi những thiết bị tinh chỉnh này sẽ tiến hành đưa quay lại bộ phát hiện lỗi địa điểm mà nó được so sánh đối với vị trí đích. Sau đó, theo các lỗi, bộ điều khiển và tinh chỉnh sẽ sửa vị trí thực tiễn của động cơ khiến cho nó khớp với địa chỉ đích.
Động cơ servo motor chủ yếu là cảm ứng phản hồi đúng chuẩn về vị trí
Động cơ thường thực hiện bộ truyền cồn có form size nhỏ, bọn chúng được thực hiện để thực hành tinh chỉnh xe ô tô, tàu thuyền, thứ bay,... Chúng cũng được áp dụng bởi các sinh viên siêng ngành kỹ thuật cần sử dụng để chế tạo robot, tạo ra cánh tay của robot, robot lấy xúc cảm từ nguyên vật liệu sinh học, robot hình người,...
2. Nguyên tắc điều khiển động cơ DC servo
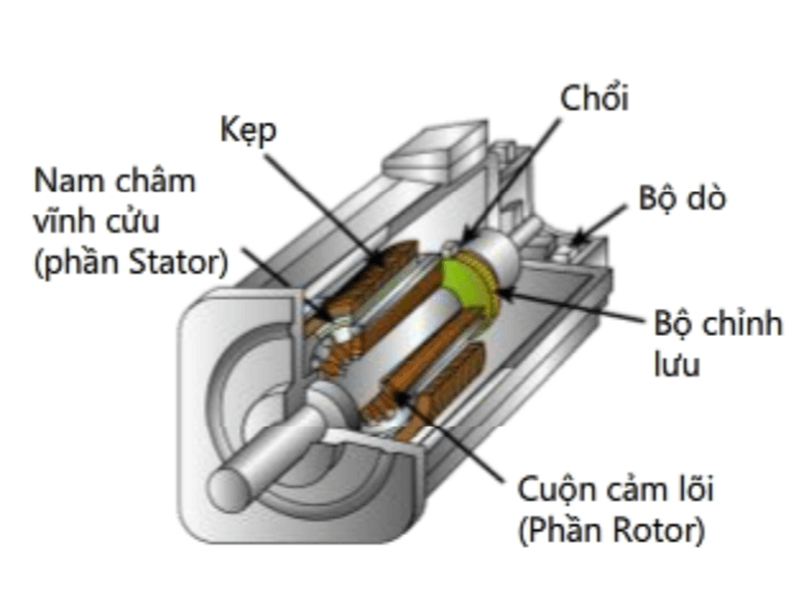
Bên vào một bộ động cơ servo truyền thống sẽ có 4 yếu tắc chính, kia là động cơ DC, hộp số, bé biến trở tương tự như mạch điều khiển. Động cơ DC có tốc độ tương đối cao với mô men xoắn thấp, mà lại đồng thời vỏ hộp số lại giảm vận tốc xuống còn khoảng chừng 60 vòng/ phút, đồng thời gia tăng mô men xoắn lên.
Chiết áp sẽ tiến hành gắn bên trên bánh răng sau cùng hoặc bên trên trục cổng đầu ra của nó, cho nên vì thế động cơ cũng tảo theo chiết áp.Từ đó, tạo ra một điện áp liên quan không nhỏ đến góc tuyệt vời và hoàn hảo nhất của mẫu trục đầu ra.
Trong mạch điều khiển, năng lượng điện áp của bộ chiết áp này được đem đối chiếu với điện áp tới từ ngay mặt đường tín hiệu. Ví như cần, bộ tinh chỉnh này đã kích hoạt mạch mong H nhằm mục tiêu tích hợp có thể chấp nhận được động cơ của sản phẩm quay theo 2 hướng cho đến khi cả hai tín hiệu đã có được mức chênh lệch giữa chúng bởi không.
Một động cơ servo thường thì được điều khiển bằng cách gửi 1 loạt những xung chạy qua đường tín hiệu. Tần số của dấu hiệu của điều khiển bây giờ phải là 50Hz hoặc 1 chu kỳ xung được xem là 20ms. Độ rộng của xung nhằm giúp xác định vị trí góc của servo cũng như các nhiều loại servo này thường rất có thể xoay được cho tới 180 độ (chúng có số lượng giới hạn vật lý mọi khi di chuyển).
Nói chung, những xung đã có được tại 1ms khớp ứng với vị trí là 0 độ và 1,5ms 90 độ và 2ms 180 độ. Tuy vậy thời gian buổi tối thiểu và thời gian tối đa của các xung đôi khi còn có thể đổi khác được theo các loại khác nhau nhưng chúng có thể là 0,5ms mang lại 0 độ cùng 2,5ms sinh hoạt tại vị trí 180 độ.
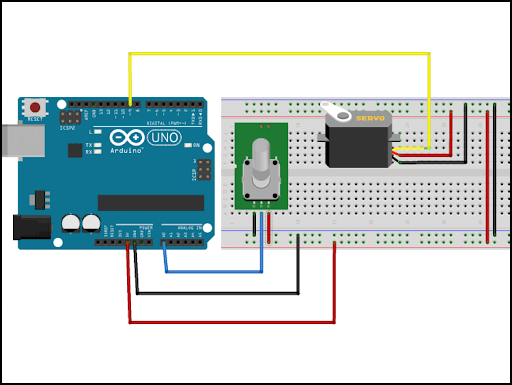
3. Sơ vật dụng mạch tinh chỉnh servo motor
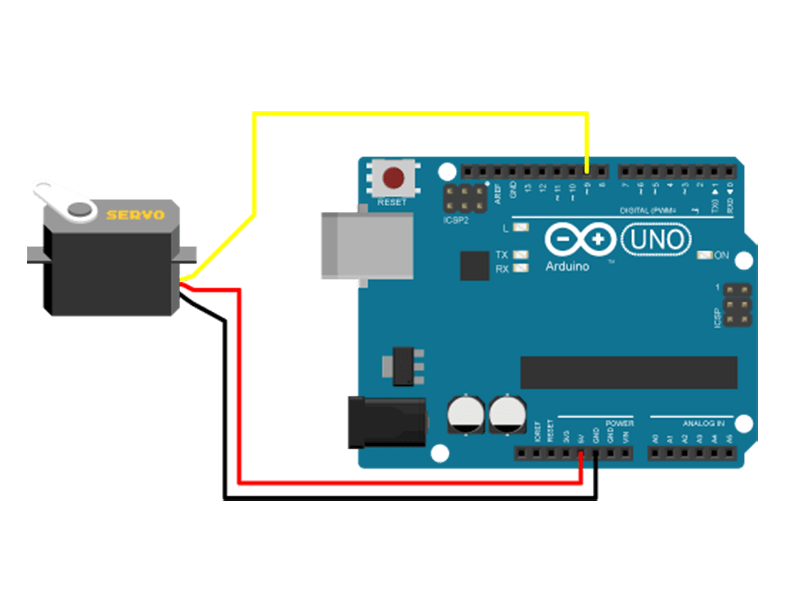
Sơ đồ gia dụng đấu nối mạch điều khiển và tinh chỉnh servo bao gồm có:
Arduino Uno | Động cơ Servo SG90 |
5V | Dây điện màu đỏ |
GND | Dây năng lượng điện màu đen |
D9 | Dây điện màu vàng |
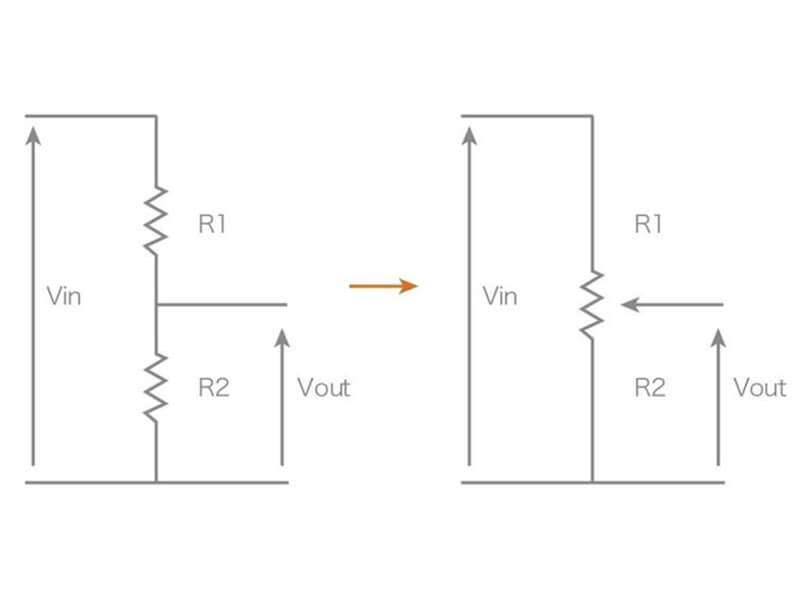
Khi có một nguồn điện đi vào phía bên trong động cơ (Vin), trong trường hợp nuốm vặn cũng rất được xoay về hướng R1 thì từ bây giờ điện trở sẽ bé dại nhất cùng cường độ mẫu điện của bộ động cơ sẽ cao nhất.
Và ngược lại, khi các bạn vặn về phía R2 thì năng lượng điện trở vẫn đạt giá chỉ trị cao nhất và cường độ dòng điện của nó sẽ bớt dần.
Sơ đồ dùng đấu nối mạch tinh chỉnh servo motor
4. Điều khiển động cơ servo dùng Code Arduino
Chúng ta hãy triển khai kiểm tra những tin tức ở trên và làm cho một ví dụ thực tiễn về cách tinh chỉnh và điều khiển một servo motor cổ xưa bằng Arduino. Thực hiện MG996R đây là 1 hộp động cơ servo tất cả mô men xoắn cao và có bánh răng sắt kẽm kim loại cùng với tế bào men xoắn có được 10 kg-cm. Mô-men xoắn cao thì sẽ có được dòng điện bất biến của servo là 2.5A. Chiếc điện đang chạy tự 500m
A 900m
A với điện áp cũng vận động từ 4,8 7,2V.
Xếp hạng lúc này còn cho biết thêm rằng bộ động cơ không thể thực hiện kết nối thẳng servo này vào cùng với Arduino, nên họ cần phải áp dụng đến nguồn điện riêng cho nó. Đây là sơ đồ vật mạch nổi bật cho ví dụ này.
Điều khiển hộp động cơ servo cần sử dụng Code Arduino
Chúng ta chỉ việc tiến hành kết nối chân tinh chỉnh của servo motor với bất kỳ chân hiện đại số nào của thành phần board Arduino, từ kia sẽ kết nối Ground và dây dương vào nguồn tích điện 5V mặt ngoài, đồng thời liên kết phần ground của Arduino vào chân GND của servo.
Bây giờ chúng ta hãy chú ý vào code Arduino để triển khai điều khiển hộp động cơ servo. Code rất solo giản, chỉ cần xác định được chân nhưng mà servo motor được kết nối, xác minh chân đó đó là đầu ra cùng trong phần vòng lặp sẽ tạo nên ra những xung với chu kỳ luân hồi và tần số rõ ràng giống như bọn họ đã phân tích và lý giải ở phần trên.
Sau một trong những thử nghiệm, bạn cũng có thể đưa ra những giá trị vào khoảng thời hạn các xung hoạt động bên trong servo. Các xung có thời lượng khoảng tầm 0,6ms khớp ứng với địa chỉ là 0 độ cùng 1,45ms cho tới 90 độ với 2,3ms.
Tiếp theo, kết nối một lắp thêm đo vạn năng mang lại nó tiếp nối với servo để thực hiện kiểm tra dòng điện. Mức loại điện tối đa mà bọn họ nhận thấy là lên đến 0,63A, bởi vì đây không hẳn là bản gốc của Tower
Pro MG996R, mà lại chỉ là bản sao tốt hơn, cho nên ví dụ chúng sẽ sở hữu được hiệu suất yếu hơn.
Tuy nhiên, chúng ta hãy sử dụng một cách thuận tiện hơn để hoàn toàn có thể điều khiển những servo bởi Arduino. Đó là sử dụng khối hệ thống thư viện Arduino Arduino. Ở đây, bạn chỉ cần nạp thư viện, tiếp nối xác định đối tượng người dùng servo rồi thực hiện hàm attach để xác định chân nhưng mà servo motor được kết nối cũng tương tự xác định giá tốt trị tối thiểu cũng tương tự giá trị về tối đa của thời lượng xung.
Sau đó, họ hãy thực hiện hàm write để tiến hành đặt địa chỉ của servo từ 0 180 độ. Với tủ sách như trên, chúng ta có thể điều khiển cùng 1 thời điểm tới 12 48 servo bằng phương pháp sử dụng bộ phận board Arduino Mega.
5. Trình tinh chỉnh PWM của motor Servo Arduino cùng PCA9685
Ngoài ra, tín đồ ta còn thực hiện một biện pháp khác để tinh chỉnh và điều khiển được motor servo bằng Arduino, kia là sử dụng trình điều khiển động cơ servo PCA9685. Đây là trình tinh chỉnh servo bao hàm 16 kênh 12 bit, rất có thể giao tiếp cùng với Arduino bằng bus I2C. Nó có một chiếc đồng hồ đeo tay tích phù hợp để hoàn toàn có thể chạy được cả 16 động cơ cùng lúc, hoặc hoạt động tự do với Arduino.
Chúng ta rất có thể xâu chuỗi vận động lên tới 62 trình tinh chỉnh và điều khiển này tức thì trên cùng một bus I2C. Bởi vậy, về mặt lý thuyết, con người hoàn toàn có thể điều khiển được cho tới 992 động cơ mà chỉ sử dụng 2 chân I2C tự board Arduino. Còn 6 chân chọn showroom cũng sẽ tiến hành sử dụng để sở hữu đặt địa chỉ cửa hàng I2C không giống nhau cho từng trình nhằm mục đích điều khiển bổ sung. Chúng ta chỉ cần kết nối với các miếng hàn dựa vào bảng này.
Dưới đấy là sơ thiết bị mạch và bọn họ sẽ phân biệt rằng, rượu cồn cơ luôn luôn cần một nguồn cung cấp điện dành riêng cho các servo.
Trình tinh chỉnh PWM của motor Servo Arduino cùng PCA9685
Các linh kiện cần thiết sử dụng:
Động cơ motor Servo MG996RTrình tinh chỉnh và điều khiển motor Servo PCA9685 PWMBoard ArduinoNguồn cung cấp điện cho bộ động cơ 5V6A DC
Bây giờ đồng hồ hãy bình chọn code Arduino. Để quản lý và vận hành được trình điều khiển và tinh chỉnh servo này, họ sẽ thực hiện thư viện PCA9685, chúng ta có thể tải xuống trường đoản cú Git
Hub.
Code Servo Arduino PCA9685
Trước tiên, các bạn cần bao quát, khoanh vùng các thư viện cùng xác định đúng chuẩn đối tượng PCA9685. Sau đó, sử dụng đối tượng người dùng Servo Evaluator để khẳng định chu kỳ xung hoặc tính cổng đầu ra PWM của công tác điều khiển. Chú ý rằng các đầu ra thường thì là 12 bit, độ sắc nét sẽ được 4096 bước.
Vì vậy, thời hạn xung về tối thiểu của động cơ là 0,5ms hoặc 0 độ, chúng sẽ khớp ứng với 102 bước và thời lượng xung buổi tối đa là 2,5ms hoặc 180 độ ở trong phần 512 bước. Như đã lý giải ở trước đó, các giá trị này đã được tự động điều chỉnh tùy thuộc vào động cơ servo của bạn. Trong trường đúng theo servo cò quý giá từ 102 470 thì sẽ tương ứng với địa điểm từ 0 180 độ.
Trong phần cấu hình thiết lập mạch điều khiển, chúng ta cần xác định được vận tốc xung I2C, đặt địa chỉ cửa hàng của trình tinh chỉnh và ở đầu cuối là để tần số thành 50Hz. Vào phần vòng lặp, bạn hãy sử dụng những hàm phối Channel PWM với pwm For Angle, bọn họ chỉ cần thiết lập servo theo góc mà mình muốn muốn.
Xem thêm: Con trai 2 tuổi rất hay đánh vào mặt mẹ và người khác phải làm thế nào các mẹ
Khi đã kết nối 1 servo thứ 2 cùng với trình tinh chỉnh và điều khiển thì chúng sẽ không ở vị trí giống như ban đầu. Chính vì các hộp động cơ mà nhiều người đang sử dụng chỉ là phiên bản sao rẻ tiền với chúng trọn vẹn không xứng đáng tin cậy.
Tuy nhiên, các bạn cũng đừng lo lắng, đây không hẳn là sự việc lớn vì ngoại trừ việc áp dụng phiên bạn dạng Servo Evaluator, chúng ta còn có thể đặt thêm các setup đầu ra không giống nhau dành cho mỗi servo. Chúng ta cũng hoàn toàn có thể tự mình điều chỉnh vị trí 90 độ trong trường hợp hộp động cơ không ban đầu ở giữa. Theo cách đó, toàn bộ các servo motor sẽ chuyển động giống y như nhau và vị trí góc cũng đúng đắn hơn.
Cách điều khiển hộp động cơ servo như thế nào cho kết quả luôn là 1 trong những vấn đề làm cho nhiều người phải “đau đầu”. Vì lẽ, bộ động cơ servo motor đó là một lắp thêm được tích hợp trong các thiết bị dây chuyền của những máy móc sản xuất nhằm mục tiêu giúp cho quy trình điều khiển thiết bị vận động thông trong cả theo mong muốn của bạn sử dụng. Để có tác dụng được như vậy, chúng ta đừng bỏ qua bài viết dưới đây!
1. Khái niệm hộp động cơ motor DC servo
Hiện nay, có rất nhiều loại bộ động cơ servo với hồ hết tính năng chính là điều khiển đúng chuẩn được địa điểm của trục. Vấn đề điều khiển động cơ servo hỗ trợ cho một hệ thống vòng bí mật có thể thực hiện phản hồi địa điểm để điều khiển được hoạt động và vị trí sau cuối của nó.Bạn đã xem: Điều khiển vị trí dc servo
Điều khiển động cơ servo giúp cho khối hệ thống vòng kín đáo phản hồi vị trí
Trong thêm vào công nghiệp, hộp động cơ servo motor đó là loại cảm ứng giúp đánh giá vị trí, thông thường là một cỗ code hóa đưa về độ đúng mực cao, trong khi trong các số đó các động cơ RC hoặc động cơ nhỏ hơn, cảm biến vị trí thường được sử dụng là một phân tách áp đối kháng giản.
Vị trí thực tiễn được các thiết bị này tìm kiếm thấy sẽ được đưa quay lại bộ phát hiện lỗi ở địa điểm này, nó vẫn được so sánh cùng với địa điểm đích. Sau đó, phụ thuộc vào lỗi mà bộ tinh chỉnh và điều khiển sửa thay vị trí thực tế của đụng cơ để cho khớp với vị trí đích.
Động cơ thường được thực hiện là bộ truyền động gồm kích thước bé dại được thực hiện để tinh chỉnh và điều khiển những phương tiện đi lại như xe cộ ô tô, thuyền, vật dụng bay,... Chúng cũng khá được các sinh viên ngành kỹ thuật dùng để chế tạo robot, chế tạo ra thành phần cánh tay robot, chế tạo ra robot lấy cảm hứng sinh học xuất xắc robot bao gồm hình người,...
2. Nguyên tắc điều khiển động cơ servo
Chúng ta hãy thực hiện kiểm tra những tin tức ở trên và làm một ví dụ thực tiễn về điều khiển một động cơ servo motor cổ điển bằng Arduino. Rất tốt bạn nên sử dụng MG996R - đây là một bộ động cơ servo gồm mô men xoắn cao cùng cả bánh răng kim loại, với mô men xoắn là 10 kg-cm. Mô men xoắn cao của đụng cơ tất cả dòng định hình đo được là 2.5A. Loại điện khi ấy sẽ chạy tự 500m
A - 900m
A với điện áp của động cơ sẽ vận động từ 4,8 - 7,2V.
Xếp hạng hiện tại thể hiện nay rằng chúng ta không thể kết nối trực tiếp được servo motor này cùng với Arduino. Mang đến nên chúng ta phải thực hiện nguồn điện lẻ tẻ dành cho nó.
Chúng ta chỉ cần kết nối phần chân điều khiển của servo motor với ngẫu nhiên chân hiện đại số nào của board Arduino, đồng thời liên kết Ground cùng dây dương với nguồn tích điện 5V từ bên ngoài và liên kết ground của Arduino vào vị trí chân GND của động cơ servo.
3. Sơ đồ vật mạch điều khiển động cơ servo
Trướctiên, chúng ta hãy nói đến conservo, hoàn toàn có thể thấy rằng phần lớn để máu kiệm ngân sách chi tiêu sản xuất, bạn ta hay sử dụng những conservo motor đã qua sử dụng. Với để chọn lựa được một dòng động cơservo cũ gồm thể vận động ổn định cùng độ chuẩn cao chưa hẳn điều dễ dàng, chúng ta nên test thật kỹ nó.
Chỉ yêu cầu đấu dây năng lượng điện của conservo với bộ tinh chỉnh và điều khiển có nhân kiệt hiển thị các thông số chi tiết, tiếp đến bấm nhằm hiệu chỉnh cho tới khi trên screen hiển thị luôn luôn dòng chữservo. Sau đó, các bạn hãy lấy cây tua vít dìm vào các nút bao gồm hình tam giác phía lên hoặc phía xuống cho đến khi thấy conservo chuyển động là được.
Quy trình tinh chỉnh động cơ dc servo diễn ra như gắng nào? Điều quan trọng nhất vào khi tiến hành sử dụng sản phẩm điều khiểnservo motor bao gồm là chúng ta phải hiểu rõ về vụ việc lập trình bé PLC, chú ý sao mang đến nó có thể đọc được biểu lộ phát xung ra từ bỏ conservo.
Phần này cũng như như bài toán calip bộ điều khiển và tinh chỉnh đem đấu nối vào con cảm ứng nhiệt độ vậy. Nếu như không nắm rõ được quy trình vận hành của bộ điều khiển nhiệt độ thì các các bạn sẽ không khi nào cài đặt được công tắc nguồn đóng - ngắt khi dòng ánh sáng của đụng cơ tạo thêm hay sút xuống.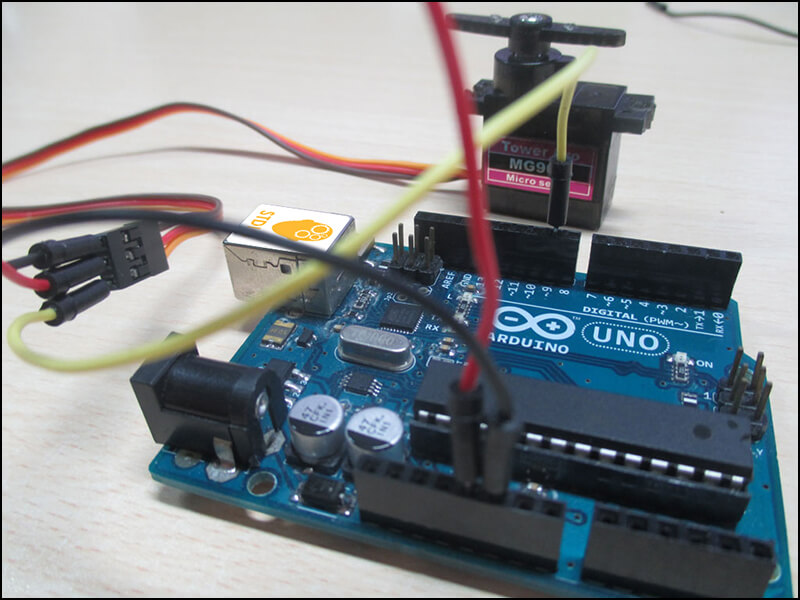
Quy trình tinh chỉnh động cơ servo motor
Phần này vô cùng khó, bởi vì đó chúng ta có thể xem các đoạn clip thể hiện thị rõ phần lập trình này khiến cho dễ đọc hơn. Quy trình đấu dây điều khiển và tinh chỉnh động cơ DCservo motor được triển khai như sau:Bạn cần sẵn sàng một nhỏ mạch cầu bao hàm có 2 dây output đầu ra ra làm việc bộ điều khiển và tinh chỉnh (Thông thường, hệ thống mạch ước thông dụng của động cơ sẽ có 2 kênh, cùng trong trường vừa lòng này, chúng ta chỉ cần sử dụng 1 kênh trên mạch mong để tinh chỉnh và điều khiển là đủ).Tiếp theo, các bạn cần chuẩn bị thêm 1 bé DC servo motor được tích thích hợp gồm gồm 6 dây. Trong đó, 2 dây sẽ khởi tạo nguồn điện để đi nuôi hộp động cơ vận hành, còn 2 dây mối cung cấp đi nuôi cho động cơ encoder, đồng thời kết hợp 2 dây đầu ra về bé encoder cùng một giắc nguồn + 1 dây điện.Tiến hành đấu nối cấp nguồn cho động cơ servo như sau:Lấy 2 dây cấp nguồn năng lượng điện từ phía động cơ servo motor nhằm đấu vào 2 chân từ bỏ kênh của bé mạch cầu. Tiếp đến, các bạn hãy cấp cho nguồn cho nhỏ mạch cầu bằng cái giắc nguồn nhưng mà ở đó chân dương của giắc cắn vào chân + mạch cầu, còn dây năng lượng điện âm của giắc sẽ phối hợp 1 đầu dây điện với đem đấu chung.Sau đó, các bạn tiến hành cấp cho nguồn cho nhỏ encoder bằng cách: dùng 2 chân âm cùng dương của bộ động cơ encoder để cắn lần lượt, nối thẳng vào chân DND và chân 5V của hệ thống boar mạch arduino. Bên trên thực tế, nếu chú ý kỹ một chút, các bạn sẽ thấy 2 chân GND với chân 5V được đặt nằm tiếp giáp nhau trên boar mạch của arduino.Còn 2 chân biểu lộ trả về còn sót lại của nhỏ encoder, bọn họ sẽ đấu nối cùng với chân cực 2 của các boar mạch arduino. Đối cùng với chân còn lại của con encoder, các bạn đem đấu vào ngẫu nhiên chân nào của con arduino, rất có thể là chân 4 – 6 – 8 các được.Tiến hành đấu nối phổ biến dây mát, nhưng trong trường phù hợp này, họ sẽ đem mát mạch ước để đấu nối bình thường mát với arduino là được.Sau đó, bạn hãy lấy 2 dây tín hiệu điều khiển từ mạch mong để đem đấu vào 2 chân đầu ra của biểu thị analog phía bên trong boar mạch arduino, đó chính là chân 7 cùng chân 8. Vớ nhiên, nhỏ arduino cũng có rất nhiều chân output biểu thị analog, chính vì lẽ đó, các chúng ta cũng có thể đấu nối vào các chân analog khác cũng không sao.Cuối cùng, các bạn sử dụng dây mối cung cấp 12V để cấp vào các giắc gặm là xong.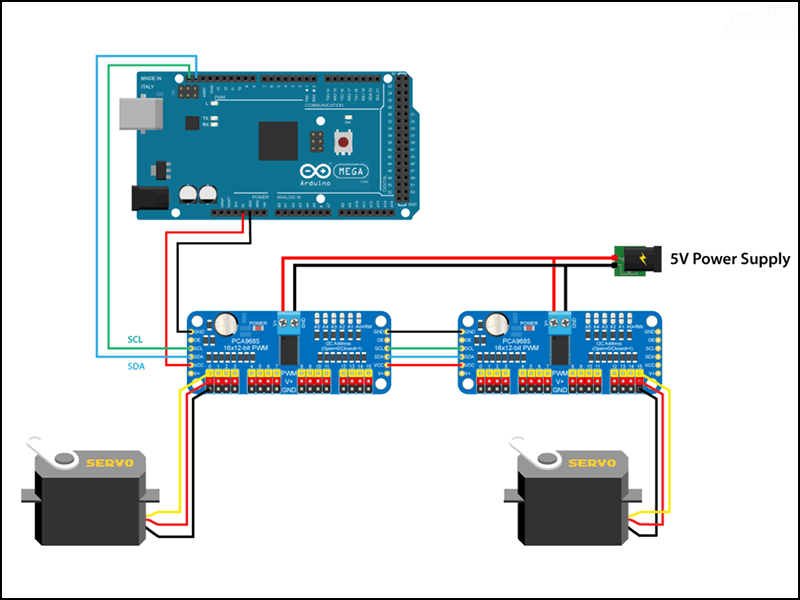
Sơ thứ mạch tinh chỉnh động cơ servo
4. Cách tinh chỉnh và điều khiển ac servo motor sử dụng code arduino
Bây giờ họ hãy áp dụng code Arduino để triển khai điều khiển hộp động cơ servo. Code cũng khá đơn giản, họ chỉ cần xác minh chân mà động cơ servo đang được kết nối. Cần xác minh chân đó đó là đầu ra và trong phần vòng lặp để tạo nên các xung với chu kỳ luân hồi cùng với phần nhiều tần số ví dụ như sống trên.
Sau khi thử nghiệm, chúng ta có thể đưa ra những giá trị nhận được trong một khoảng thời gian mà các xung vận động cùng với bộ động cơ servo. Các xung tất cả thời lượng 0,6ms sẽ tương ứng với vị trí trong tầm 0 độ - 1,45ms - 90 độ và từ 2,3ms - 180 độ.
Tiến hành kết nối một lắp thêm đo vạn năng để có thể nối tiếp với servo nhằm kiểm tra loại điện. Mức chiếc điện tối đa cơ mà các các bạn sẽ nhận được hoàn toàn có thể lên mang lại 0,63A. Điều này hoàn toàn đúng, chính vì đây không phải là phiên bản gốc của bộ động cơ Tower
Pro MG996R, mà bao gồm là phiên bản sao rẻ hơn, ví dụ đem lại công suất kém hơn.
Tuy nhiên, chúng ta hãy tham khảo một cách làm dễ dàng hơn để có thể điều khiển những servo motor bằng Arduino xuất sắc nhất, kia là sử dụng thư viện Arduino Arduino. Chúng ta chỉ cần setup thư viện, kế tiếp xác định đối tượng người tiêu dùng của servo và thực hiện hàm Attach để khẳng định chân mà servo motor được kết nối.
Đồng thời, xác định giá trị về tối thiểu cùng giá trị về tối đa của thời lượng xung. Sau đó, bằng cách áp dụng hàm write, chúng ta chỉ bắt buộc đặt vị trí của servo trong khoảng từ 0 - 180 độ. Với thư viện Arduino, chúng ta cũng có thể điều khiển đồng thời từ 12 - 48 servo bằng cách sử dụng khối hệ thống board Arduino Mega.
Sử dụng code Arduino để thực hiện điều khiển bộ động cơ servo
5. Trình tinh chỉnh và điều khiển PWM/ Servo bởi Arduino cùng PCA9685
Bên cạnh đó, còn tồn tại một biện pháp khác để có thể điều khiển servo bởi Arduino, đó là thực hiện trình điều khiển động cơ servo PCA9685. Đây là chương trình tinh chỉnh và điều khiển servo với servo bao hàm 16 kênh 12 bit, có thể giao tiếp cùng với Arduino bởi bus I2C. Động cơ này có một chiếc đồng hồ đeo tay tích thích hợp giúp cho bạn cũng có thể chạy được cho tới 16 bộ động cơ cùng lúc, hoặc hoạt động chủ quyền đối cùng với Arduino.
Chúng ta có thể cùng 1 thời điểm xâu chuỗi lên đến mức 62 trình điều khiển và tinh chỉnh này ở trên và một bus I2C. Bởi vì vậy, về phương diện lý thuyết, bọn họ sẽ rất có thể điều khiển được cùng lúc tới 992 bộ động cơ chỉ với nhị chân bé I2C từ board Arduino. 6 chân chọn vị trí được sử dụng để đặt cho add I2C khác nhau đối với mỗi chương trình điều khiển và tinh chỉnh bổ sung. Cuối cùng, họ chỉ đề xuất kết nối các miếng hàn của sơ vật theo bảng này là được.
Các linh kiện mà chúng ta cần chuẩn bị để triển khai điều khiển kia là hộp động cơ Servo MG996R, trình tinh chỉnh Servo PCA9685 PWM, mạch điều khiển board Arduino, nguồn cung ứng điện bao gồm điện áp 5V- 6A DC,... Hiện nay hãy tìm hiểu code Arduino. Để tinh chỉnh được trình điều khiển và tinh chỉnh servo motor hiệu quả, họ sẽ sử dụng thư viện PCA9685, bạn có thể tải xuống trường đoản cú trang Git
Hub.
CC-SMART là đơn vị chuyên về xây đắp và chế tạo cácmạch tinh chỉnh động cơ tại Việt Nam, cisnet.edu.vn hiện chỉ marketing một số sản phẩm cơ bạn dạng của
CC-SMART, để bài viết liên quan về các sản phẩm của
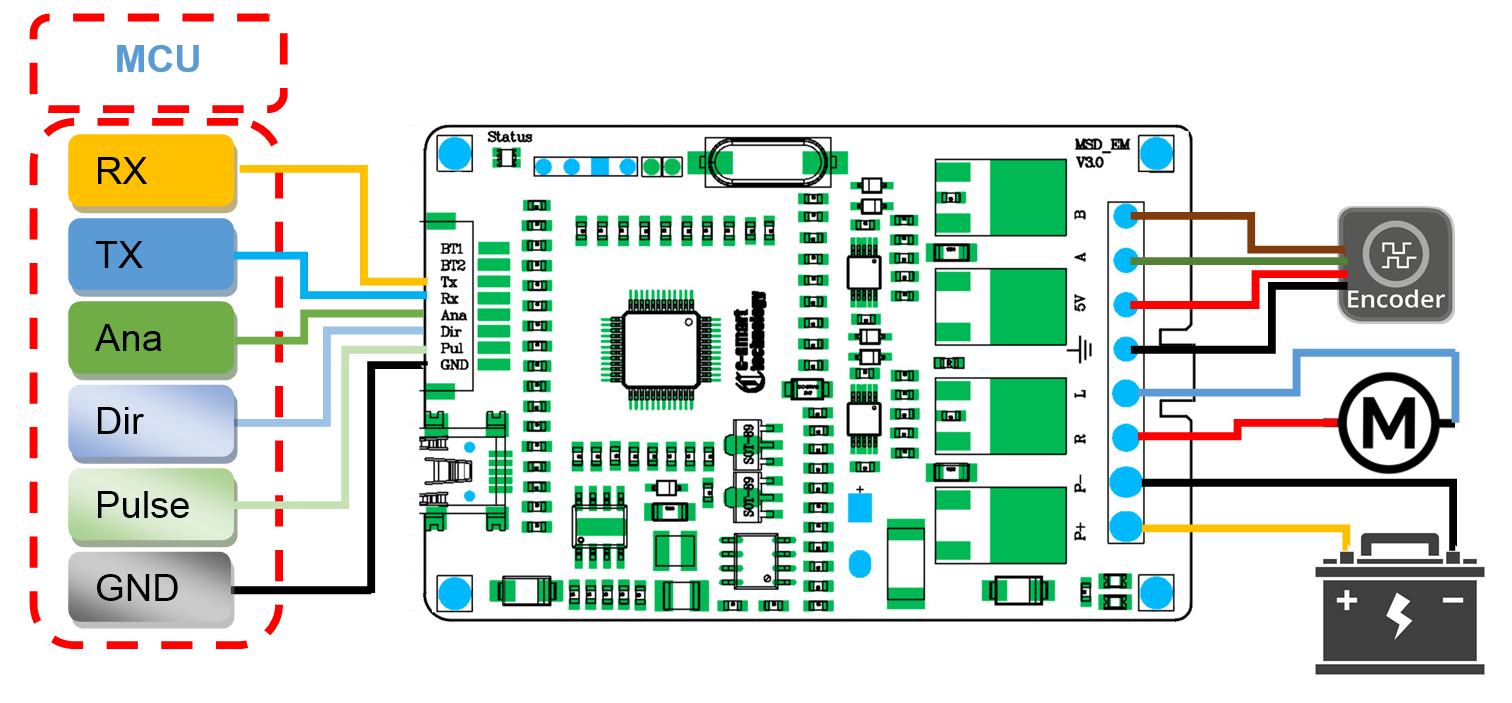
CC-SMART cũng tương tự hợp tác kinh doanh xin vui lòng liên hệ tại đây.Giới Thiệu:Mạch điều khiển và tinh chỉnh động cơ DC Servo PID Driver CC-SMART MSD_E10hỗ trợ nhiều chức năng như: giao tiếp bằng xung/chiều, UART, bảo đảm an toàn quá tải, vượt dòng, vượt nhiệt, phát hiện encoder hư, động cơ hư...Có thể sử dụng Mạch tinh chỉnh và điều khiển động cơ DC Servo PID Driver CC-SMART MSD_E10để điều điều khiển vị trí, tốc độ và vận tốc cho một động cơ DC Servo,phù hợp mang đến những ứng dụng vừa và nhỏ, cần tinh chỉnh góc (vị trí) hoặc điều khiện vận tốc của một cơ cấu tổ chức chấp hành, robot làm sao đó.Mạch điều khiển và tinh chỉnh động cơ DC Servo PID Driver CC-SMART MSD_E10có ứng dụng hỗ trợ, tích vừa lòng nhiều cách thức điều khiển trực quan không giống nhau, cùng với các thông số kỹ thuật PID hoàn toàn có thể điều chỉnh được trực tiếp trên phần mềm giúp bạn dùng có thể dễ dàng hiểu, kiểm tra chất lượng của bộ tinh chỉnh ngay lập tức.Ở cơ chế ngõ vào tín hiệu từ UART, Mạch tinh chỉnh và điều khiển động cơ DC Servo PID Driver CC-SMART MSD_E10có thể kết nối nhiều driver lại với mọi người trong nhà như một mạng những driver với địa chỉ cửa hàng xác định hỗ trợ cho board nhà (Master) hoàn toàn có thể điều khiển (gửi những tham số xuống) được nhiều driver MSD (Slave) cùng lúc trên 1 con đường UART, cũng trong cơ chế UART, bạn dùng rất có thể đọc thẳng các thông số vị trí hiện tại tại, vận tốc hiện tại, dòng điện hiện tại tại. Tương tự như các mã lỗi giả dụ có xuất phát từ một driver slave.Ở chế độ ngõ vào điều khiển Xung/Chiều (Pulse/Dir): Cứ 1 tín hiệu xung đẩy vào chân Pulse của driver, nó đang quay một góc tương xứng với xung đó theo chiều được xác minh bằng chân Dir (mức ngắn gọn xúc tích chân Dir 1: chiều thuận hoặc 0: chiều nghịch).Trong cơ chế điều khiển vận tốc, chúng ta cũng có thể sử dụng một đổi thay trở mắc thẳng vào chân Analog của driver nhằm điều khiển vận tốc của bộ động cơ mà không buộc phải thêm bất cứ thành phần nào khác.Mạch tinh chỉnh động cơ DC Servo PID Driver CC-SMART MSD_E10cũng có thể cấu dường như một mạch ước H dìm tín hiệu tinh chỉnh qua UART với những tính năng bảo vệ quá tải, quá nhiệt cùng ngắn mạch.Mạch tinh chỉnh động cơ DC Servo PID Driver CC-SMART MSD_E10có một cổng USB, cổng này sẽ lộ diện như 1 cổng COM ảo (Virtual COM) nếu không thể liên kết được với phần mềm Dc
Turing
Pro sau khi Driver khởi rượu cồn 15s giúp tín đồ dùng có thể dễ dàng dùng bất kể phần mềm nào hỗ trợ Serial để tiếp xúc với driver.Mặc mặc dù Mạch điều khiển và tinh chỉnh động cơ DC Servo PID Driver CC-SMART MSD_E10rất nhỏ dại gọn tuy thế tích hợp tương đối đầy đủ các thiên tài của một Dc Servo Driver công nghiệp rất phù hợp cho những ứng dụng robot, máy auto nhỏ, lẻ tẻ và đề nghị giá thànhthấp.Thông số kỹ thuật:10-40VDC, 0-10A, 1-200W.Điều khiển vị trí, vận tốc, gia tốc.Công cụ tự động hóa dò thông số PID.Hiển thị các thông số qua LED 7 đoạn.Bảo vệ quá dòng, quá nhiệt, ngắn mạch.Phát hiện Encoder hư, mất Phase đụng cơ.Bảo vệ khi sai số quá ngưỡng cho phép.Hỗ trợ tiếp xúc USB với ứng dụng Dc
Turning
Pro.Hỗ trợ COM ảo để giao tiếp với người dùng.Phương thức giao tiếp: Pulse/Dir, UART, USB, Analog (Velocity mode).Tích hợp các bộ điều khiển và tinh chỉnh vòng kín: Smart
PID, PID, PI, State feedback.Chế độ H-Bridge với những tính năng bảo vệ quá dòng, quá nhiệt.Ứng Dụng:Tìm hiểu sâu rộng về cách thức điều khiển vòng kín.Ứng dụng vào giảng dạy, nghiên cứu.Robot, CNC.Nghiên cứu vớt và sản xuất ra các máy móc tự động với độ đúng chuẩn cao.
Demo:
Sơ đồ dùng kết nối:
bài trước
Thi hoàn thành xuôi tất cả lại về, những bản nhạc chế vui nhộn của táo bị cắn dở quân
bài sauLý do khiến kinh nguyệt Ít hơn bình thường, do dự của những người
Leave a Rcisnet.edu.vnly Cancel rcisnet.edu.vnly
Your e-mail address will not be published. Required fields are marked *









{kind=link}