Chọn mức 1Chọn nấc 2Chọn nút 3Chọn nấc 4Chọn nút 5
PID là 1 trong khái niệm quan trọng đặc biệt trong điều khiển và tinh chỉnh tự động, tự động hóa. Bây chừ chúng được sử dụng khá nhiều trong các ứng dụng công nghiệp. Nội dung bài viết này BKAII cùng chúng ta tìm đọc về PID, Bộ tinh chỉnh PID với những thông tin về khái niệm, nguyên lý, phân một số loại và ứng dụng nhé!
PID tương đối đầy đủ là Proportional Integral Derivative. Đây là một trong những cơ chế phản hồi vòng tinh chỉnh trong các khối hệ thống điều khiển công nghiệp được thực hiện rộng rãi. Bộ điều khiển và tinh chỉnh này được chính thức được đưa vào và sử dụng nhiều tốt nhất trong các khối hệ thống điều khiển vòng bí mật hay các hệ thống có biểu lộ phản hồi.
Bạn đang xem: Điều khiển vị trí dùng pid
Bộ điều khiển và tinh chỉnh PID giúp các máy technology tính toán ra các giá trị không nên số là hiệu số giữa những giá trị đo thông số kỹ thuật về hải dương đối và quý giá đặt theo ước muốn của bạn thiết kế, người dùng. Thông qua các điều chỉnh giá trị tinh chỉnh và điều khiển đầu nhưng mà nhờ vào đó khối hệ thống điều khiển khi triển khai sẽ bớt được buổi tối đa đều sai số, đến hoạt động đúng chuẩn hơn và đạt kết quả cao hơn.
Mục tiêu áp dụng bộ tinh chỉnh PID
PID được coi là là bộ tinh chỉnh lý tưởng của các hệ thống điều khiển quy trình hiện đại. Nó được sử dụng phần nhiều trong những ứng dụng điều khiển quá trình auto trong công nghiệp.
Để kiểm soát và điều chỉnh lưu lượng, sức nóng độ, áp suất,…Giảm sai số xác lập tới mức tối thiểu nhấtHạn cơ chế dao động
Giảm thời hạn xác lập và độ vọt lố.
Các các loại bộ điều khiển PID
Bộ điều khiển này còn có thể tạo thành các loại:
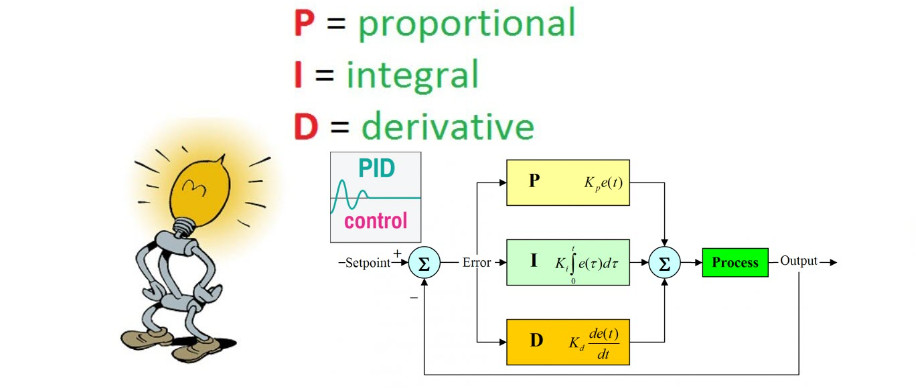
PI hay có tên gọi khá đầy đủ là Proportional & Integral Controller là bộ điều khiển tỉ lệ, tích phân.P là Proportional Controller, bộ tinh chỉnh và điều khiển tỉ lệ.PID đó là viết tắt của Proportional, Integral, and Derivative (PID) Controller. Nó là bộ tinh chỉnh tỉ lệ, tích phân, đạo hàm.PD là Proportional and Derivative Controller là bộ điều khiển và tinh chỉnh đạo hàm.Nguyên lý buổi giao lưu của bộ điều khiển và tinh chỉnh PID
Hệ thống điều khiển PID tự động bao gồm:
Cơ cấu chấp hành (thiết bị gia nhiệt).Vì sao cần điều khiển và tinh chỉnh PID?
Ta vẫn trả lời câu hỏi thông qua việc tìm hiểu quá trình kiểm soát nhiệt độ nước xả ra trường đoản cú lò sưởi đốt gas công nghiệp.
Với phương pháp bằng tay người vận hành phải xem đồng hồ thời trang đo nhiệt, kiểm soát và điều chỉnh van thì mới kiểm soát điều hành nhiệt độ chan nước xả. Nếu như nhiệt độ tăng dần đều thì phải vặn bớt góc mở van gas. Nếu ánh nắng mặt trời giảm cảm thấy không được mức yêu mong thì tăng góc mở của van.
Điều khiển này điện thoại tư vấn là tinh chỉnh và điều khiển phản hồi vì thay đổi tốc độ đốt trải qua phản hồi từ đồng hồ đo nhiệt. Sự biến đổi van gas đều ảnh hưởng đến nhiệt độ độ. Tác dụng được đưa về cho tất cả những người vận hành thông qua đồng hồ thời trang và nó là một trong những vòng tái diễn tuần hoàn.
Ngày nay dùng bộ PID để điều hành và kiểm soát nhiệt độ tiện lợi hơn. Hệ thống có thể dùng sản phẩm công nghệ đo nhiệt độ điện tử, sử dụng van tinh chỉnh điện kết phù hợp với bộ điều khiển, tùy chỉnh cấu hình cũng như liên kết với lắp thêm đo nhiệt cùng van.
Các kỹ sư sẽ tùy chỉnh tham số vào độ tinh chỉnh và điều khiển ở nhiệt hy vọng muốn. địa điểm lắp sao để cho đầu ra của cục là địa điểm van tinh chỉnh đặt. Từ cảm biến nhiệt, tín hiệu nhiệt độ đo được truyền đến cỗ PID. Vật dụng sẽ so sánh giá trị ánh sáng nhận từ cảm biến với quý giá nhiệt độ điểm đặt ban đầu. Nó đo lường và tính toán sai số, chênh lệch với dựa trên tác dụng vừa tính ra để khẳng định đầu ra, góc mở van giúp nhiệt độ luôn luôn nằm trong giá trị chất nhận được tại điểm đặt. Lúc nhiệt tăng thì bộ điều khiển sẽ bớt góc mở van với khi sức nóng thấp thì bộ điều khiển sẽ tăng góc mở van.
Ứng dụng của bộ điều khiển PID
Hiện nay PID được ứng dụng trong vô số nhiều ngành nghề khác nhau.
Xem thêm: 10+ mẫu khung sắt trang trí sân thượng đẹp độc lạ 2023, 10+ mẫu khung sắt bảo vệ sân thượng đẹp
Nó hoàn toàn có thể được dùng để giảm những sai số, tinh giảm sự xê dịch hay là giảm thời gian gian xác lập với độ vọt lố…Sử dụng để điều khiển và tinh chỉnh mực nước:bộ tinh chỉnh được auto hóa dựa vào vào các thiết bị điện tử như cảm biến, van điều khiển…Điều khiển đổi mới tần:Các thiết bị điện tử phối kết hợp ở đây có có: van điều khiển và tinh chỉnh lưu lượng, cảm biến nhiệt độ, biến chuyển tần điều khiển….Kiểm soát lưu lại lượng khí qua đường ốngĐiều khiển PID vào PLC:Ở trong PLC hay sẽ được thiết kế theo phong cách sẵn các hàm dùng để điều chỉnh nhiệt độ, áp suất, lưu giữ lượng….
Trên đây là những khám phá của BKAII về PID với bộ điều khiển PID. Có thắc mắc hay đề xuất thêm thông tin chúng ta liên hệ BKAII nhé!
Một trong những vấn đề từng làm đau đầu tổ lập trình sẵn robot trong số những năm qua là robot chạy bất ổn định, vừa mới lập trình chạy được khi chạy thêm 1 vòng nữa thì lại bị lỗi, khi Pin đầy robot chạy tốt , pin sạc yếu một chút ít thì lại chạy sai. Việc dừng trên một vị trí đúng đắn nào đấy trên sân cũng khá quan trọng, tuy nhiên robot lại lúc thì dừng vị trí này, thời điểm lại giới hạn dừng nơi kia.Sau nhiều nghiên cứu một chiến thuật đã được tra cứu ra, chính là bộ điều khiển và tinh chỉnh động cơ dùng giải mã PID. Kỹ thuật tinh chỉnh và điều khiển PID tuy ko phải là một trong những kỹ thuật điều khiển mới, cơ mà lại là kỹ thuật phổ biến nhất chuyên dùng để điều khiển các hệ thống trong công nghiệp như khối hệ thống lò nhiệt, tinh chỉnh và điều khiển tốc độ, vị trí, moment bộ động cơ AC cùng DC. Giữa những lý vì chưng bộ tinh chỉnh PID trở nên thịnh hành như vậy nguyên nhân là tính 1-1 giản, dễ tiến hành trên đầy đủ vi xử lý nhỏ dại với hiệu năng đo lường và thống kê hạn chế.
Cấu trúc tầm thường của khối hệ thống vòng kín đáo như sau:
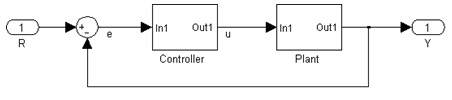
Hình 1: cấu trúc chung của hệ thống điều khiển vòng kín
Trong hình mẫu vẽ trên:
- Plant: là khối hệ thống cần được điều khiển
- Controller: cung ứng tín hiệu điều khiển cho Plant, có phong cách thiết kế để điều khiển toàn thể đáp ứng của hệ thống.
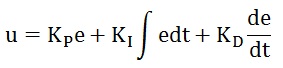
Hàm truyền của bộ tinh chỉnh và điều khiển PID gồm dạng như sau:

Trong đó:
- KP: Độ lợi khâu tỷ lệ
- KI: Độ lợi khâu tích phân
-KD: Độ lợi khâu vi phân
Biến số (e) đại diện thay mặt cho không đúng số giữa giá chỉ trị mong muốn (R) và quý hiếm ngõ ra (Y). Sai số này (e) đã được mang tới bộ tinh chỉnh PID, và bộ tinh chỉnh này sẽ tính toán cả vi phân với tích phân của tín hiệu sai số này. Biểu thị (u) sẽ có giá trị như sau:
Tín hiệu (u) sẽ được đưa đến đối tượng người tiêu dùng điều khiển và ta đã thu được một biểu thị (Y) mới. Biểu đạt này đang lại được chuyển đến cảm ứng để giám sát ra không nên số mới (e). Bộ tinh chỉnh lại đo lường các quý hiếm vi phân, tích phân của không nên số này. Quy trình cứ nỗ lực lặp đi lặp lại.
Đặc tính của bộ điều khiển P, I cùng D: bộ điều khiển phần trăm (KP) có công dụng làm giảm thời hạn lên và sẽ làm giảm, dẫu vậy không triệt tiêu, không nên số nghỉ ngơi trạng thái xác lập (steady- state error).
Bộ điều khiển tích phân (KI) đang triệt tiêu không nên số ngơi nghỉ trạng thái xác lập, nhưng lại có thể làm giảm quality của thỏa mãn nhu cầu quá độ.
Bộ điều khiển vi phân (KD) đã làm tăng độ ổn định của hệ thống, bớt độ vọt lố với tăng unique đáp ứng vượt độ.
Tác đụng của từng bộ điều khiển và tinh chỉnh KP, KI, KD được trình diễn trong bảng sau:
Thời gian lên | Độ vọt lố | Thời gian quá độ | Sai số xác lập | |
KP | Giảm | Tăng | Thay đổi nhỏ | Tăng |
KI | Giảm | Tăng | Tăng | Triệt tiêu |
KD | Thay thay đổi nhỏ | Giảm | Giảm | Thay thay đổi nhỏ |
Cần để ý rằng vào bộ điều khiển PID, sự những tác đụng này rất có thể không chính xác, bởi vì KP, KI với KD phụ thuộc vào lẫn nhau. Thực ra, đổi khác một vào các thông số kỹ thuật này rất có thể làm thay đổi tác hễ của hai thông số kỹ thuật còn lại.
Chỉnh định bộ tinh chỉnh PID bằng phương thức Zeigler – Nichols: Ban đầu, đặt toàn bộ các độ lợi KP, KI, KD bằng 0. Tiếp nối tăng KP lên cho đến khi dành được giá trị độ lợi Ku, là độ lợi mà lại ở đó ngõ ra của hệ thống ban đầu dao cồn với biên độ không đổi. Ku và chu kỳ xấp xỉ Tu được dùng để đo lường các độ lợi KP, KI, KD nhờ vào công thức sau.
Bộ điều khiển | KP | KI | KD |
P | Ku/2 | - | - |
PI | Ku/2.2 | Tu/1.2 | - |
PID | Ku/1.7 | Tu/2 | Tu/8 |
Driver PID cho hộp động cơ DC:
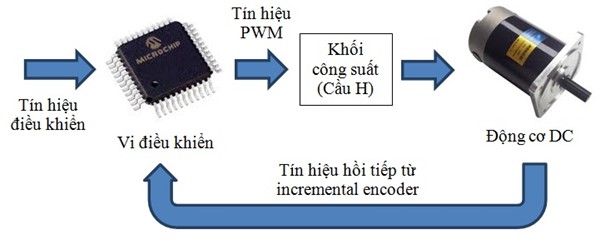
Hình 2: Sơ đồ dùng khối phần cứng
Trong mạch điều khiển và tinh chỉnh này, vi điều khiển đóng vai trò đặc biệt nhất. Nó dấn tín hiệu điều khiển từ main board, biểu thị hồi tiếp từ hễ cơ trải qua incremental encoder để thống kê giám sát ra cực hiếm PWM quan trọng xuất ra cho cỗ khuếch đại công suất tinh chỉnh và điều khiển động cơ đạt tốc độ/vị trí ý muốn muốn. Như đã nói sống trên, PID là thuật toán điều khiển khá 1-1 giản, vì đó, ta có thể sử dụng các vi điều khiển và tinh chỉnh từ cái 8bit (8051, AVR, PIC16, PIC18) đến những dòng thời thượng hơn như cái 16bit (ds
PIC, PIC24) hoặc 32bit (ARM, PIC 32bit, AVR 32bit).
Incremental encoder cũng là thành phần không thể thiếu trong hệ thống, nó cung cấp thông tin về trạng thái hiện giờ của khối hệ thống cho vi điều khiển. Encoder gồm độ phân giải càng tốt thì cho chất lượng điều khiển càng tốt. Tuy nhiên, encoder có độ phân giải cao thì cũng yêu cầu kỹ năng xử lý của vi điều khiển cao hơn.
Khối hiệu suất nhằm cung cấp điện áp đúng mực điều khiển đụng cơ chuyển động dựa trên vấn đề xử lý, đo lường và thống kê của vi điều khiển. Tùy theo công suất của hộp động cơ cần điều khiển và tinh chỉnh mà ta đề xuất thiết khối này mang đến phù hợp.









{kind=link}